
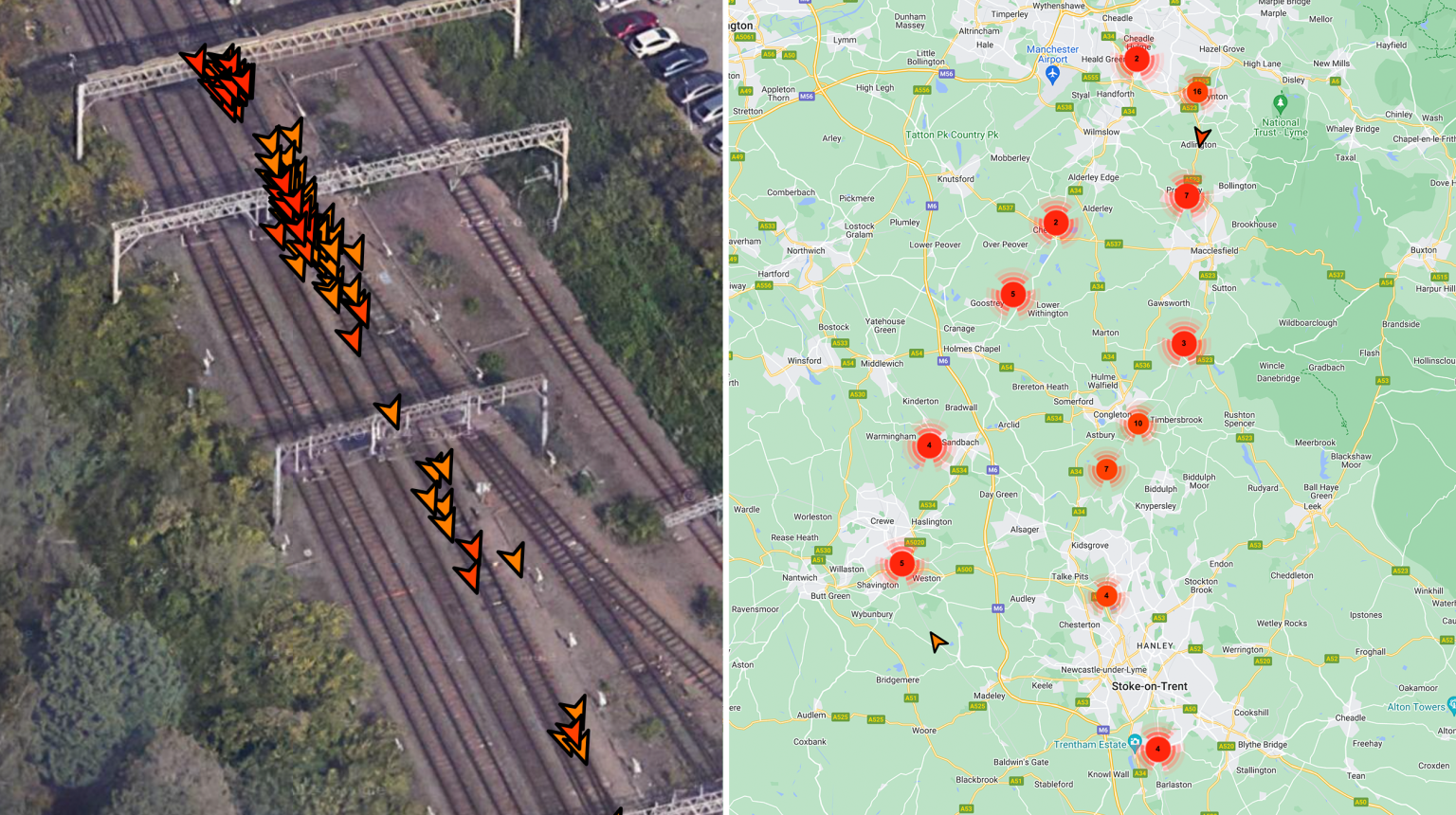
Faulty Dropper Wires
Droppers can fail very often; for instance, the ECML between Cambridge Junction and Stoke Junction reported an average of four dropper failures weekly in 2020. The impact of a single failure can be minor to very significant, often resulting in compounding delays to railway services. PANDAS-V® routinely detects and reports a wide range of faulty dropper wires with differing failure modes, ranging from mild damage to fully detached or broken.
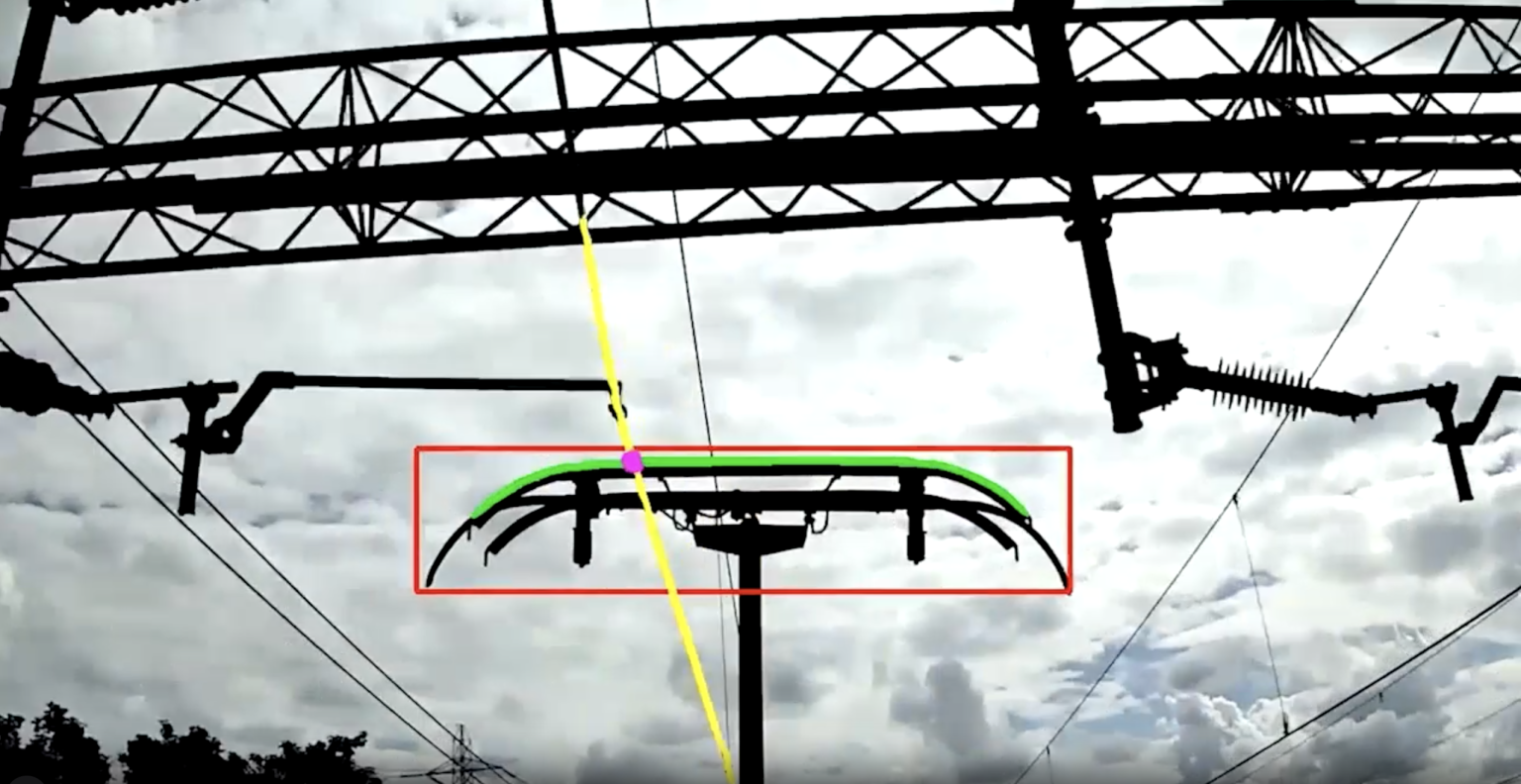
Misaligned Section Isolator
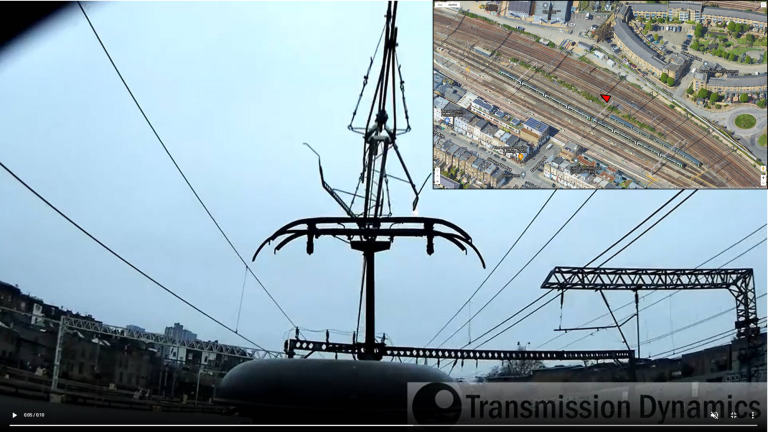
Our pantograph camera technology plays a vital role in the early detection of misaligned neutral sections, significantly contributing to the safety and operational efficiency of rail networks.
“I have spoken with NR and they have confirmed that unbelievably there isn’t anything missing from the section isolator but it it’s very misaligned, and does present a de-wirement risk.” – Angel Trains
Bird Strikes
Pantograph bird strikes are more than just a rare occurrence; they’re a real and frequent challenge that can cause damage ranging from mild to severe. Our pantograph monitoring solution routinely detects bird strikes, promptly informing key stakeholders to evaluate damage and strategically allocate resources.
Pantograph Flip
Our innovative solution addresses the critical issue of pantograph flip, ensuring reliable contact with the overhead catenary system and enhancing the operational integrity of rail networks.
Arcing
Arcing, a significant railway safety concern, can lead to power fluctuations or even electrical failures on trains, potentially risking passenger well-being. By employing real-time monitoring for pantograph arcing, rail operators can swiftly detect and address such issues, ensuring service reliability and passenger safety. Our PANDAS-V® system also provides valuable data for proactive maintenance planning, which ultimately reduces downtime and associated costs.
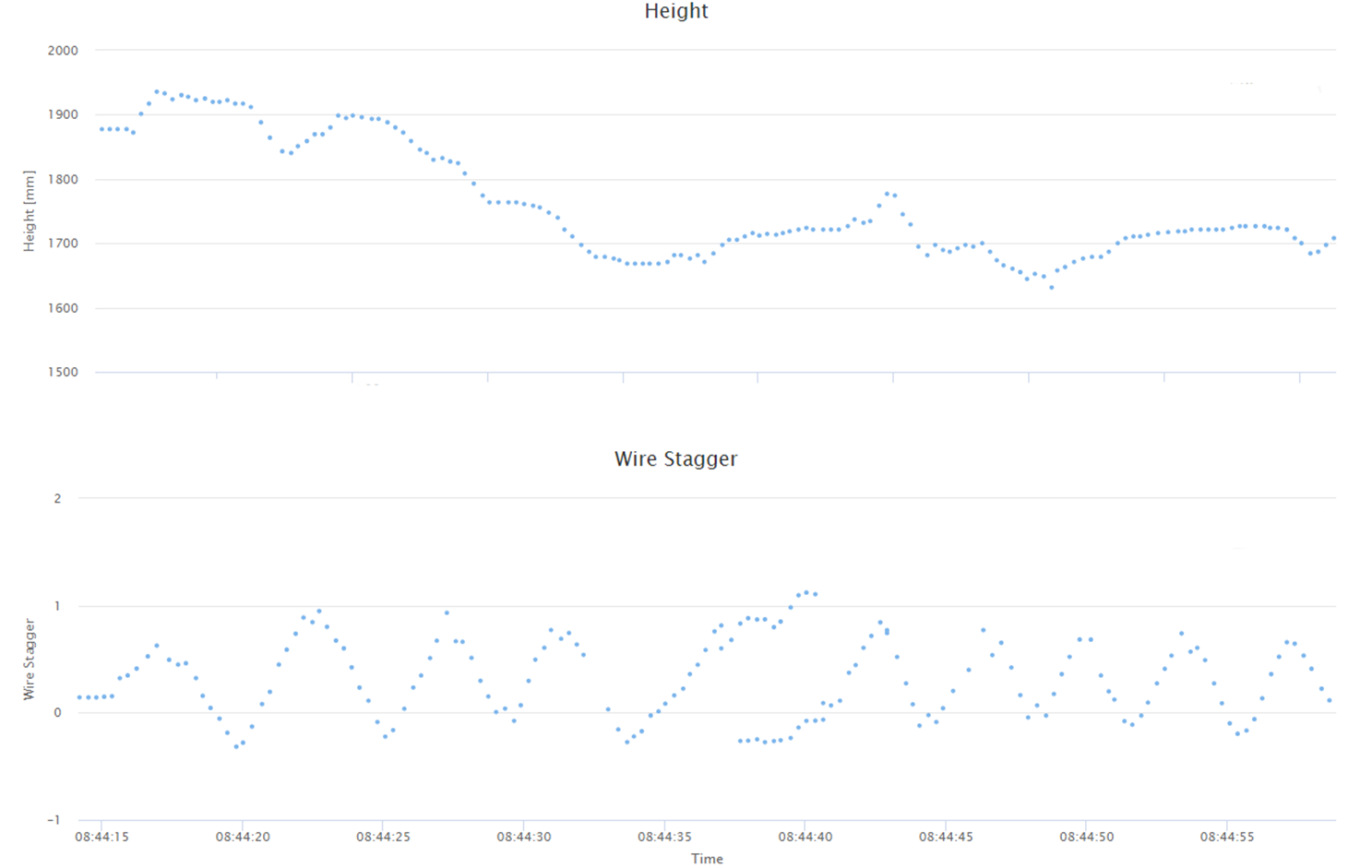
Wire Stagger
Utilising advanced machine image processing algorithms, our overhead line monitoring system continuously detects wire stagger during routine train operation. The received data is processed, establishing weekly baselines to track trends and identify any changes to the infrastructure.
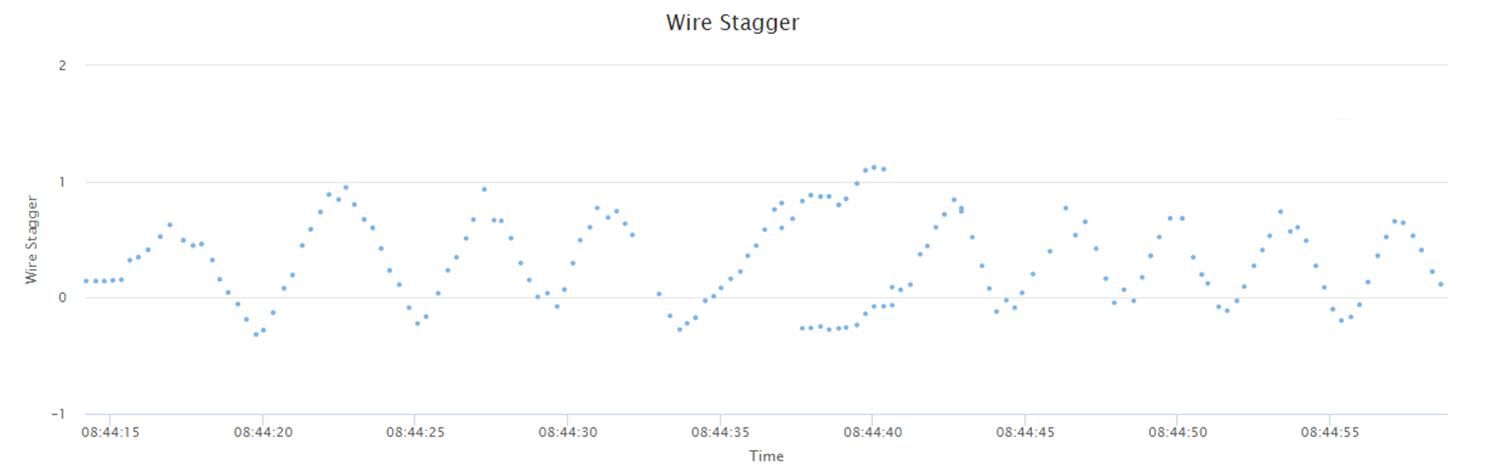
PANDAS-V® stagger analytics
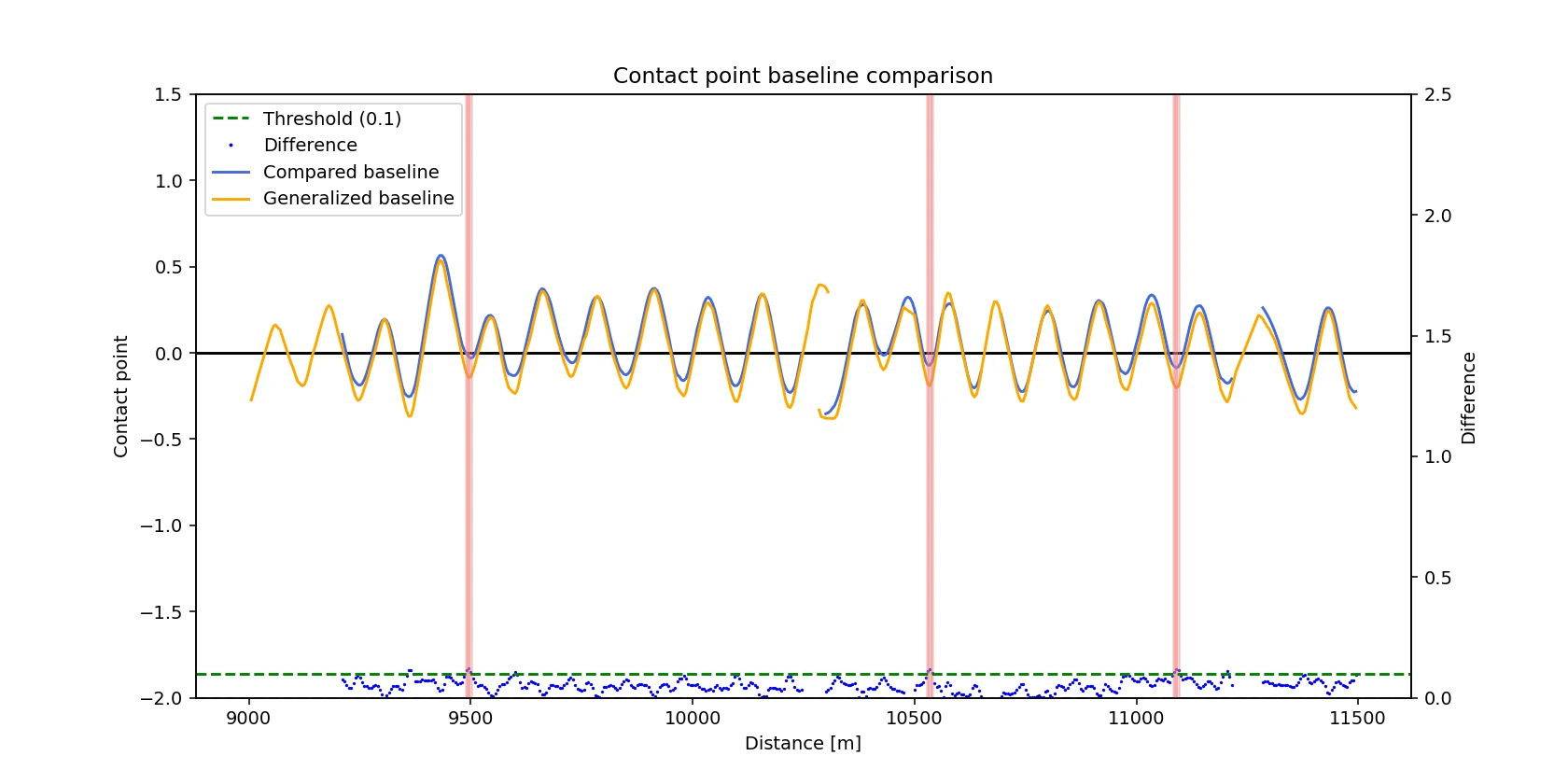
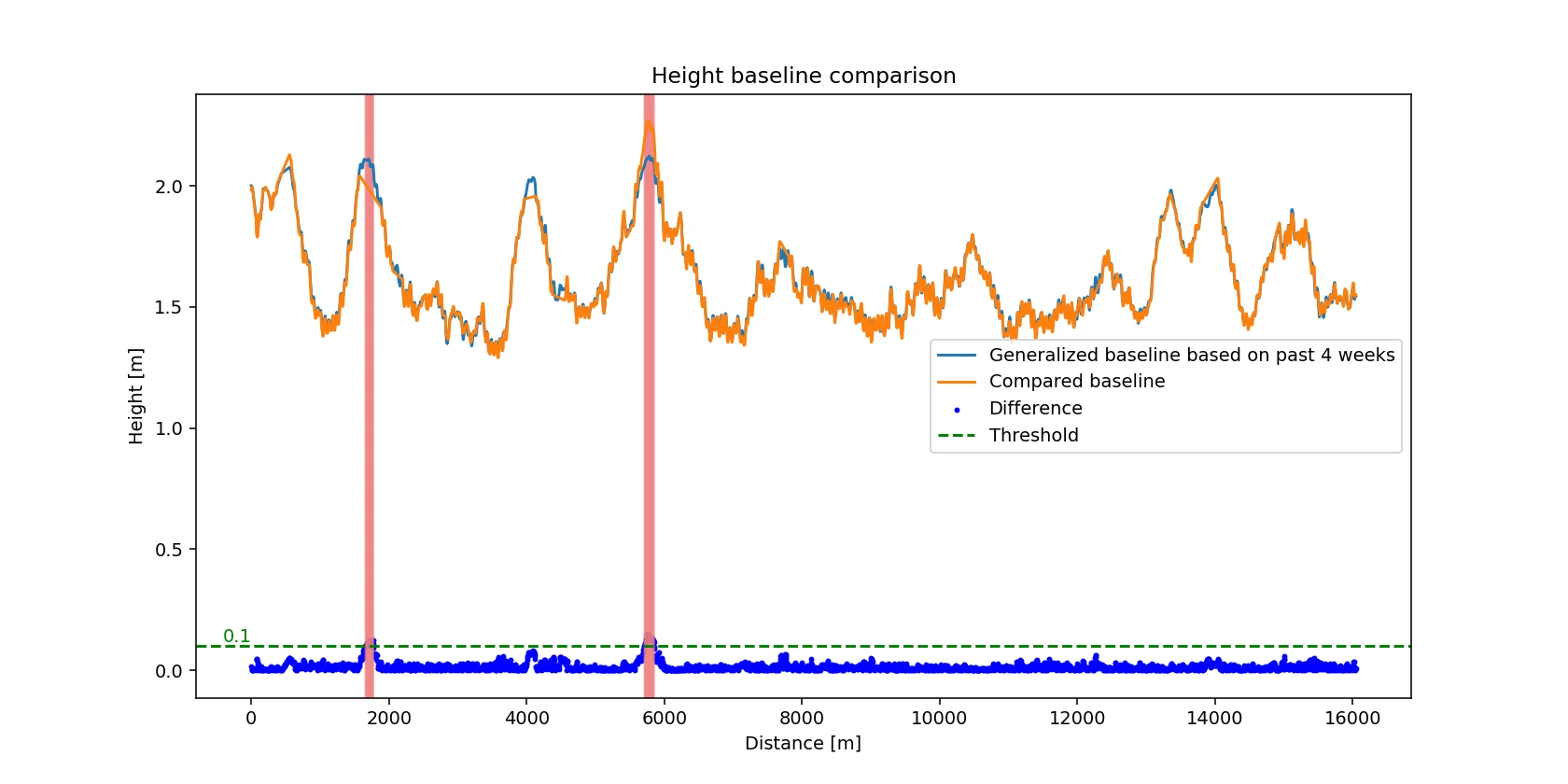
Pantograph Height
With sophisticated computer vision capabilities, our PANDAS-V® pantograph camera continuously monitors pantograph height during routine train operations. The received data is processed, and weekly baselines are trended to detect variations in the railway infrastructure promptly.
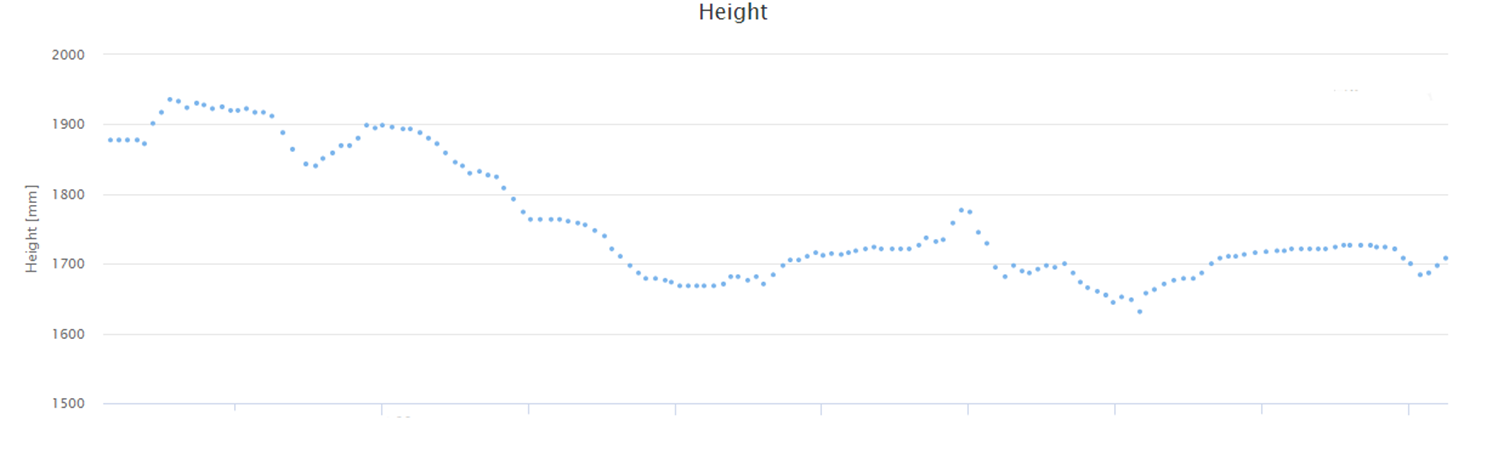
PANDAS-V® height analytics
Foliage
Our advanced remote monitoring system features real-time foliage detection, alerting users to the proximity of foliage within predefined distances, ensuring proactive risk management.
Bird Nests
Our catenary monitoring solution tackles the challenges posed by birds’ nest, ensuring unobstructed operations and prioritising railway safety and efficiency. For example, a nest was reported and removed within the same day by maintenance crews.

“This poses a risk as bird’s nests within 600mm of 25kV live parts can cause a short circuit and part the catenary conductors”. – Network Rail.
Carbon Chips
Carbon chip disruptions pose a persistent challenge for fleets. Our PANDAS-V® system pinpoints locations causing repetitive carbon damage, thereby optimising fleet performance and improving safety.
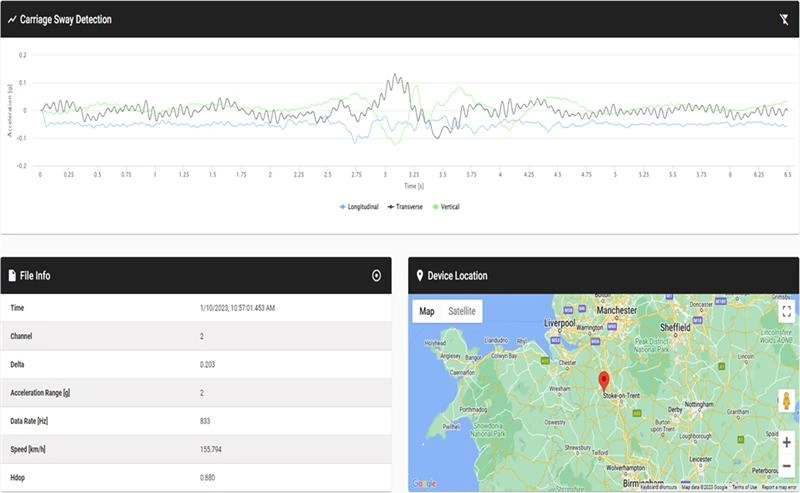
Ride Quality & Sway
Network Rail has reported that extreme weather conditions across Britain are escalating the risk of landslips, posing a threat to railway infrastructure and safety. Proactive measures are essential to safeguard against these events.

Major landslip near Hook station in Hampshire, January 2023.
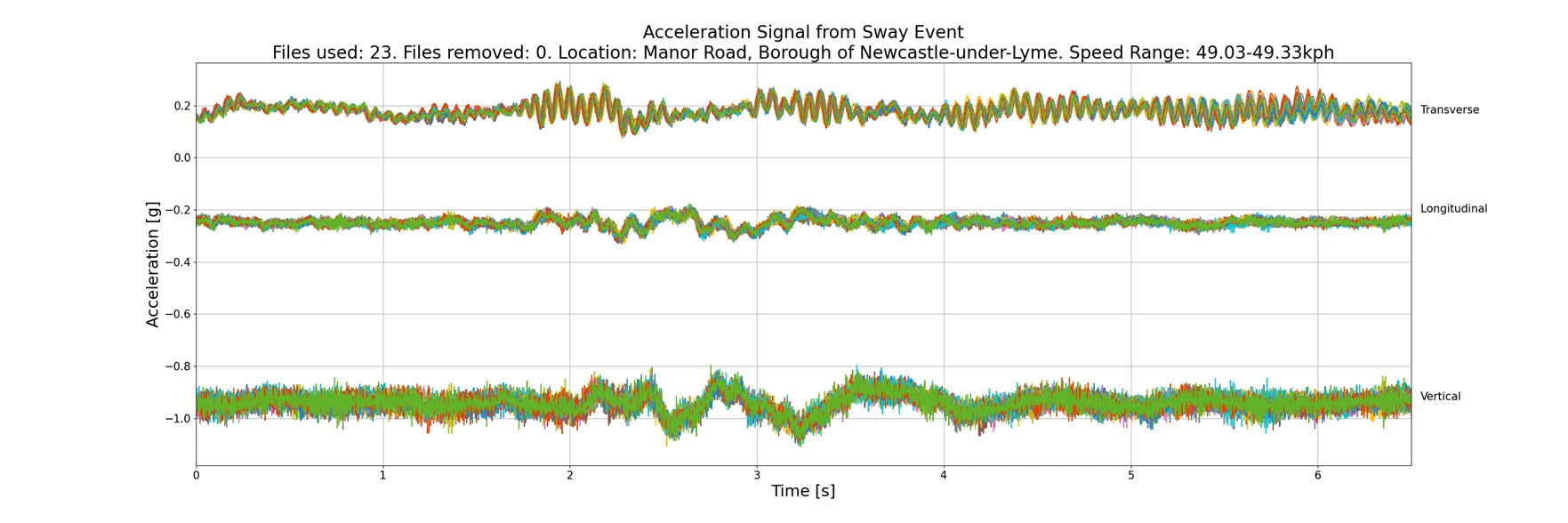
Real-time monitoring by PANDAS-V® automatically detects deviations in ride quality through carriage sway variations. It alerts rail operators to critical faults which compromise railway safety and can lead to derailments.
The below example shows the repeatability of measurements over 23 consecutive runs:
Slack Headspan Wire
In this incident, PANDAS-V® swiftly detected and reported a slack headspan wire minutes after the fault occurred. Without immediate remediation, this issues led to a dewirement within two hours of the initial fault detection.
“Unfortunately, we were not able to catch this fault in time and Scottish teams are now dealing with a wire down. The video and info will be invaluable for incident review meetings that will follow.” – Network Rail
Converging Wires
PANDAS-V® detects high impact loads as a result of converging overhead line wires. Converging wires often feature a change in height, leading to mild to severe impacts.
Hard Spots
PANDAS-V® identifies hard spots within the rail catenary system, pinpointing the exact GPS location. For instance, the example below shows a hard spot caused by a registration arm that lacks vertical movement, and creating a large impact every time a pantograph passes.
“These components are a natural ‘hard spot’ and have to set-up very accurately to minimise high forces at 125mph / 200kph. PANDAS V will help us to prioritise neutral section sites & interventions.” – Network Rail
Cross Contact Wire Detection
PANDAS-V® detected and reported a faulty cross contact wire within minutes of the fault occurring. Key stakeholders responded immediately, and measures were put in place to mitigate further damage.
“This is an unfortunately common, but still very severe, failure mode with our cross contact arrangements. We’ve had a number of multi million pounds incidents arising from this issue. I’ve informed the local DU who were not yet aware. They are now responding. This will likely be a block to electric traction until the bar can be replaced, as well as on site inspection. Early warning on this type of issue is incredibly valuable. Without PANDAS it’s entirely possible our first indication of the issue could have been a dewirement.” – Network Rail
Broken Branch Detection
Following a series of storms in the UK. PANDAS-V® has proven essential for overhead line monitoring, particularly in detecting broken brand impacts. During Storm Isha, PANDAS-V® detected a broken branch impacting the overhead catenary system and sent an automatic report to key stakeholders, enabling swift response measures.

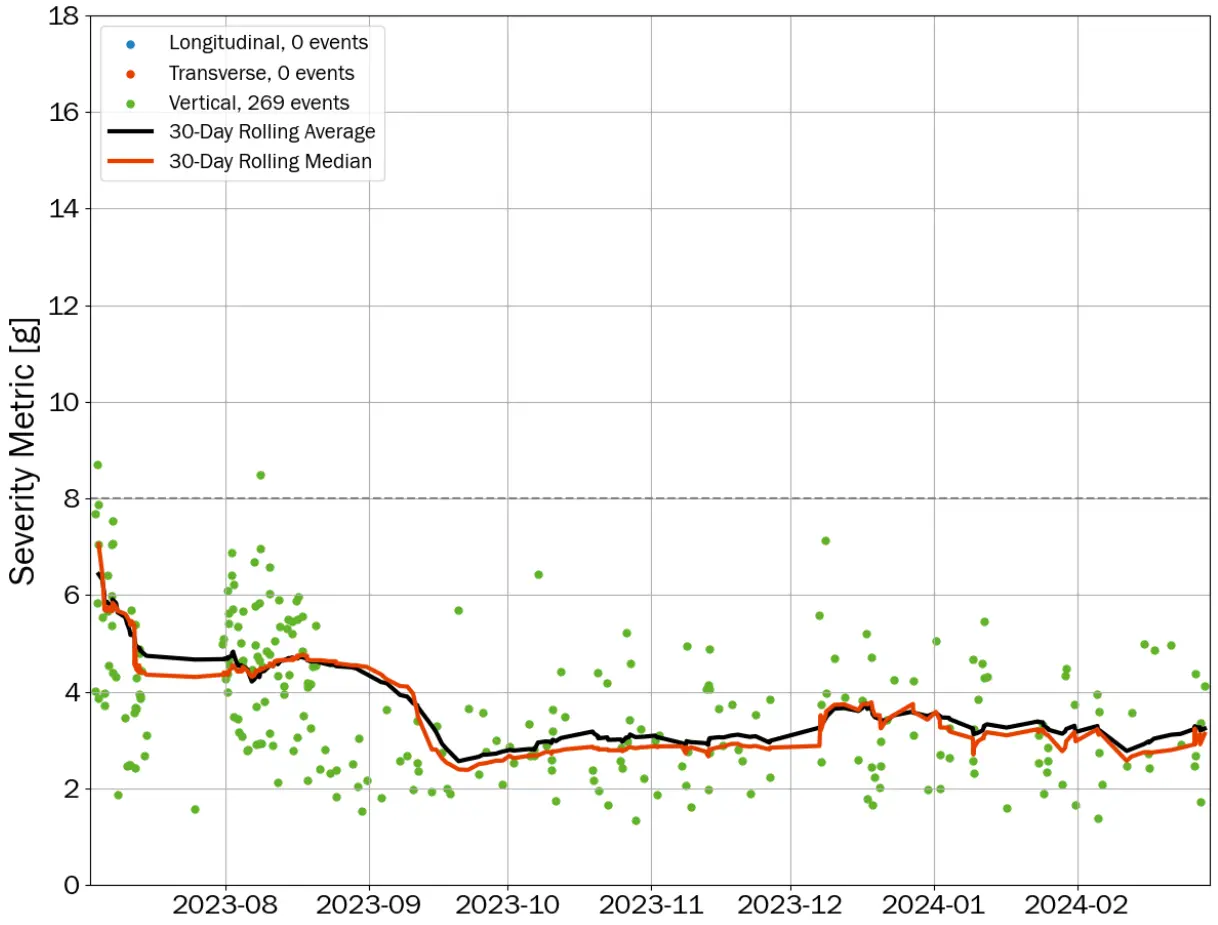
Impact Events
Detection of Impact Events
Our advanced sensor technology is instrumental in identifying a range of impact events, including droppers, misaligned neutral sections, and birdstrikes, ensuring swift responses to uphold the safety and efficiency of rail operations.
Faulty Dropper Wires
Droppers can fail very often; for instance, the ECML between Cambridge Junction and Stoke Junction reported an average of four dropper failures weekly in 2020. The impact of a single failure can be minor to very significant, often resulting in compounding delays to railway services. PANDAS-V® routinely detects and reports a wide range of faulty dropper wires with differing failure modes, ranging from mild damage to fully detached or broken.
Our pantograph camera technology plays a vital role in the early detection of misaligned neutral sections, significantly contributing to the safety and operational efficiency of rail networks.
“I have spoken with NR and they have confirmed that unbelievably there isn’t anything missing from the section isolator but it it’s very misaligned, and does present a de-wirement risk.” – Angel Trains
Bird Strikes
Pantograph bird strikes are more than just a rare occurrence; they’re a real and frequent challenge that can cause damage ranging from mild to severe. Our pantograph monitoring solution routinely detects bird strikes, promptly informing key stakeholders to evaluate damage and strategically allocate resources.
Broken Branch Detection
Following a series of storms in the UK. PANDAS-V® has proven essential for overhead line monitoring, particularly in detecting broken brand impacts. During Storm Isha, PANDAS-V® detected a broken branch impacting the overhead catenary system and sent an automatic report to key stakeholders, enabling swift response measures.
Slack Headspan Wire
In this incident, PANDAS-V® swiftly detected and reported a slack headspan wire minutes after the fault occurred. Without immediate remediation, this issues led to a dewirement within two hours of the initial fault detection.
“Unfortunately, we were not able to catch this fault in time and Scottish teams are now dealing with a wire down. The video and info will be invaluable for incident review meetings that will follow.” – Network Rail
Cross Contact Wire Detection
PANDAS-V® detected and reported a faulty cross contact wire within minutes of the fault occurring. Key stakeholders responded immediately, and measures were put in place to mitigate further damage.
“This is an unfortunately common, but still very severe, failure mode with our cross contact arrangements. We’ve had a number of multi million pounds incidents arising from this issue. I’ve informed the local DU who were not yet aware. They are now responding. This will likely be a block to electric traction until the bar can be replaced, as well as on site inspection. Early warning on this type of issue is incredibly valuable. Without PANDAS it’s entirely possible our first indication of the issue could have been a dewirement.” – Network Rail
Converging Wires
PANDAS-V® detects high impact loads as a result of converging overhead line wires. Converging wires often feature a change in height, leading to mild to severe impacts.
Hard Spots
PANDAS-V® identifies hard spots within the rail catenary system, pinpointing the exact GPS location. For instance, the example below shows a hard spot caused by a registration arm that lacks vertical movement, and creating a large impact every time a pantograph passes.
“These components are a natural ‘hard spot’ and have to set-up very accurately to minimise high forces at 125mph / 200kph. PANDAS V will help us to prioritise neutral section sites & interventions.” – Network Rail
Advanced Detection
Pantograph Flip
Our innovative solution addresses the critical issue of pantograph flip, ensuring reliable contact with the overhead catenary system and enhancing the operational integrity of rail networks.
FoliageOur advanced remote monitoring system features real-time foliage detection, alerting users to the proximity of foliage within predefined distances, ensuring proactive risk management.
Our catenary monitoring solution tackles the challenges posed by birds’ nest, ensuring unobstructed operations and prioritising railway safety and efficiency. For example, a nest was reported and removed within the same day by maintenance crews.
“This poses a risk as bird’s nests within 600mm of 25kV live parts can cause a short circuit and part the catenary conductors”. – Network Rail.
Arcing
Arcing, a significant railway safety concern, can lead to power fluctuations or even electrical failures on trains, potentially risking passenger well-being. By employing real-time monitoring for pantograph arcing, rail operators can swiftly detect and address such issues, ensuring service reliability and passenger safety. Our PANDAS-V® system also provides valuable data for proactive maintenance planning, which ultimately reduces downtime and associated costs.
Wire Stagger
Utilising advanced machine image processing algorithms, our overhead line monitoring system continuously detects wire stagger during routine train operation. The received data is processed, establishing weekly baselines to track trends and identify any changes to the infrastructure.
PANDAS-V® stagger analytics
Pantograph Height
With sophisticated computer vision capabilities, our PANDAS-V® pantograph camera continuously monitors pantograph height during routine train operations. The received data is processed, and weekly baselines are trended to detect variations in the railway infrastructure promptly.
PANDAS-V® height analytics
Carbon Chips
Carbon chip disruptions pose a persistent challenge for fleets. Our PANDAS-V® system pinpoints locations causing repetitive carbon damage, thereby optimising fleet performance and improving safety.
Ride Quality & Sway
Network Rail has reported that extreme weather conditions across Britain are escalating the risk of landslips, posing a threat to railway infrastructure and safety. Proactive measures are essential to safeguard against these events.
Major landslip near Hook station in Hampshire, January 2023.
Real-time monitoring by PANDAS-V® automatically detects deviations in ride quality through carriage sway variations. It alerts rail operators to critical faults which compromise railway safety and can lead to derailments.
The below example shows the repeatability of measurements over 23 consecutive runs:
The icon represents exclusive Transmission Dynamics Artifical Intelligence (AI) technology.

This is really proving its worth - sounds like we've prevented a catastrophic neutral section failure.
The PANDAS system has prevented 8 major incidents on our rail network over the past year.
As a result of the visibility offered by PANDAS-V®, Network Rail have reduced some standard manual level inspection frequencies from 6 weekly to 11 weekly, almost halving the frequency of which these will take place in future.










I’ve informed the local DU who were not yet aware. They are now responding. This will likely be a block to electric traction until the bar can be replaced, as well as on site inspection.
Early warning on this type of issue is incredibly valuable. Without PANDAS it’s entirely possible our first indication of the issue could have been a dewirement.
Keen to discuss a way to fast track this type of issue to a response team in future.
The PANDAS-V® system will undoubtedly contribute to reducing the number of de-wirements, each costing ca.£1m to resolve, as well as the critical safety and operational impacts.




